01 — Work
Projects
Click any project to see more
Featured Research
Surface-Based Manipulation with Modular Foldable Robots
Using flat surfaces as minimalist end-effectors to translate, rotate, and flip objects via closed-loop control. Published in npj Robotics, 2026.
Master Thesis
Learning to Land on Flexible Structures
RL-trained drone that lands on and maintains contact with flexible tree branches. PPO/SAC with domain randomization.
Dr. Emanuele Aucone, Prof. Stefano Mintchev · ETH Zurich ERL
Semester Project
Controlling the Legs of a 12t Walking Excavator Using Reinforcement Learning
A reinforcement learning locomotion controller for a 12-ton walking excavator. Trained on mixed terrain in simulation with PPO, validated on real hardware.
Dr. Pascal Egli, Dr. Julian Nubert, Prof. Marco Hutter · ETH Zurich RSL
.png)
Neural Network BMS for Electric Vehicles
LSTM-based SOC prediction. Challenge Cup Special Prize.
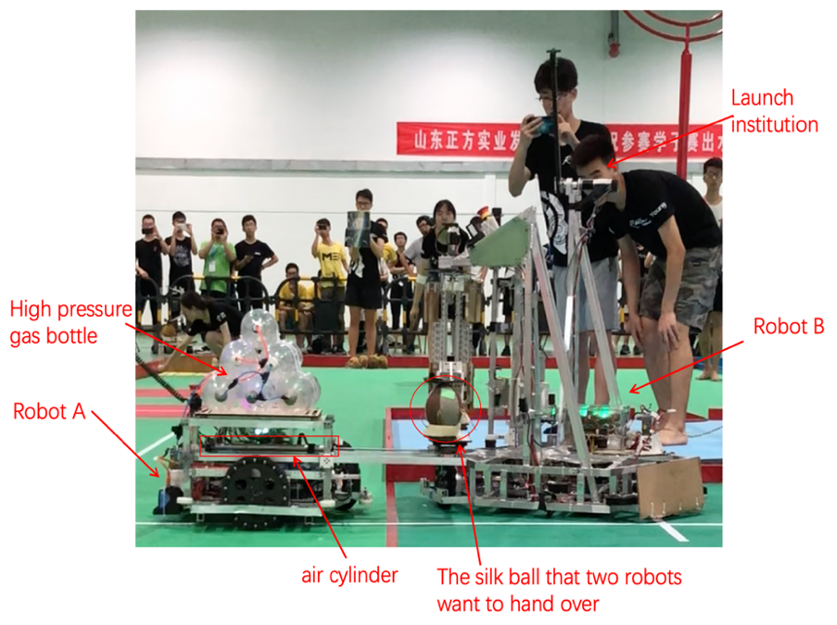
Multi-Agent Robot System (Robocon, 2nd Prize)
Multi-sensor fusion and motion planning for collaborative robots.
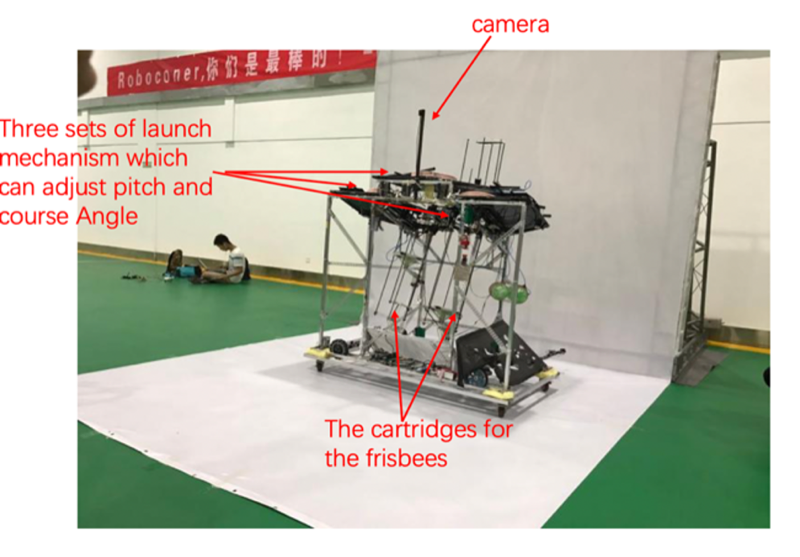
Frisbee Robot with Machine Vision (Robocon, 3rd + Best Technical)
Vision-based targeting, six design iterations.
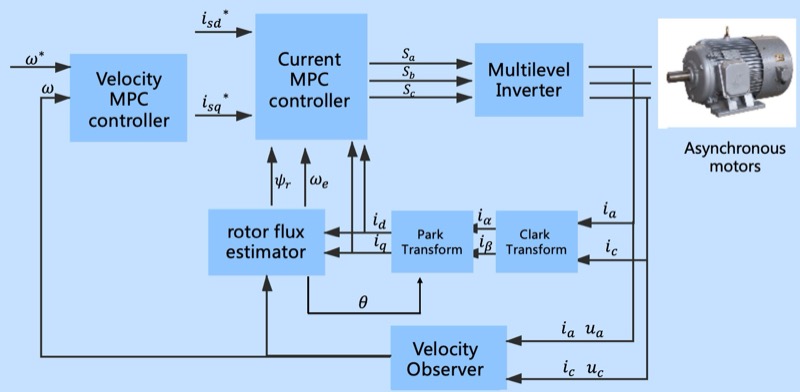
MPC for Asynchronous Motor Control
Bachelor thesis: cascaded MPC with sensorless speed observer.
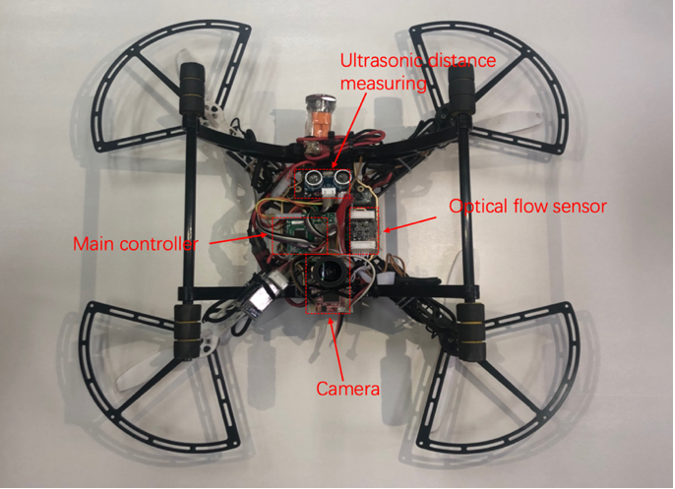
Quadrotor for Object Tracking (National 1st Prize)
Built from scratch with computer vision. National 1st prize.

Cesium Atom Concentration Sensor
Multi-channel radiation detection for mobile robots.
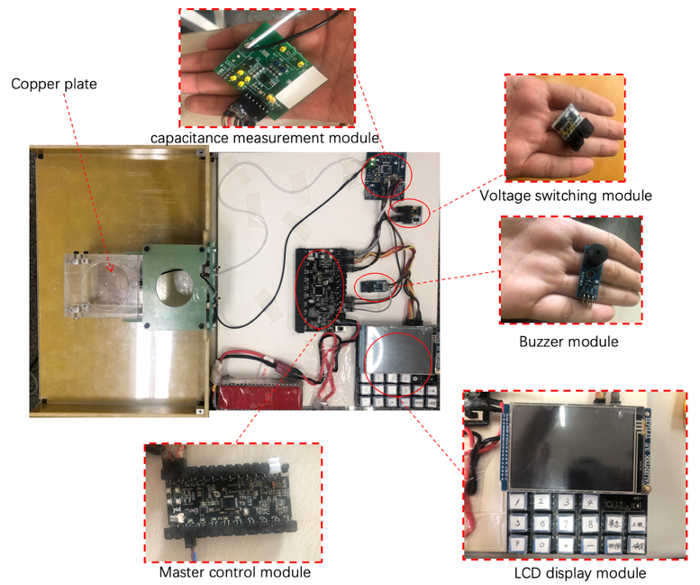
Paper Quantity Detection (National 1st Prize)
LC resonance capacitance sensor, up to 80 sheets.

Gesture Recognition Device
Hand gesture detection over a test area.
