The Quadrotor
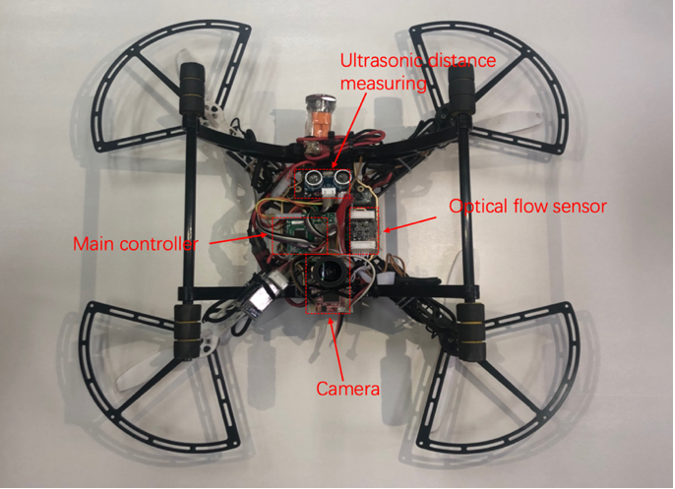
Custom-built quadrotor — ultrasonic sensor, optical flow sensor, camera, main controller
Technical Details
- Formulated mathematical models for the dynamics of a quadrotor aircraft
- Developed multiple control algorithms and strategies to regulate the moving trajectory
- Integrated computer vision for real-time object tracking
- Built from scratch — hardware design, sensor integration, and software stack
- Served as project manager
National 1st Prize — 2019 National Undergraduate Electronic Design Contest · Software Copyright Registration No. 2019SR0860797