Control Architecture
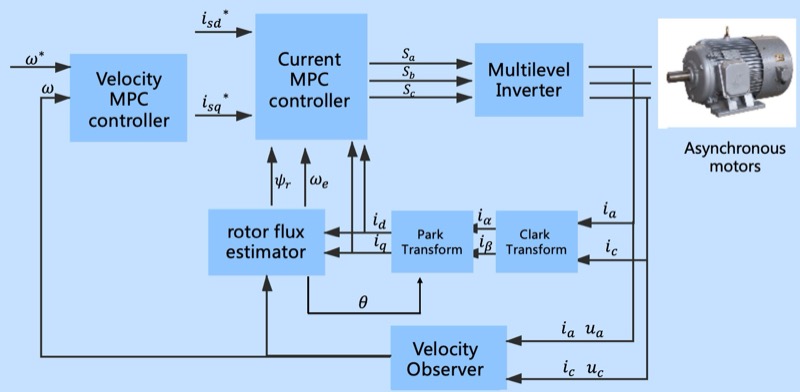
Cascaded MPC architecture — velocity MPC controller, current MPC controller, multilevel inverter, and asynchronous motor
Technical Details
- Designed a cascaded MPC architecture with separate velocity and current controllers
- Built a corresponding state observer for sensorless speed estimation
- Integrated with a multilevel inverter for asynchronous motor drive
- Bachelor thesis at Xi'an Jiaotong University, completed 2020