Concept: Surface vs. Grasping
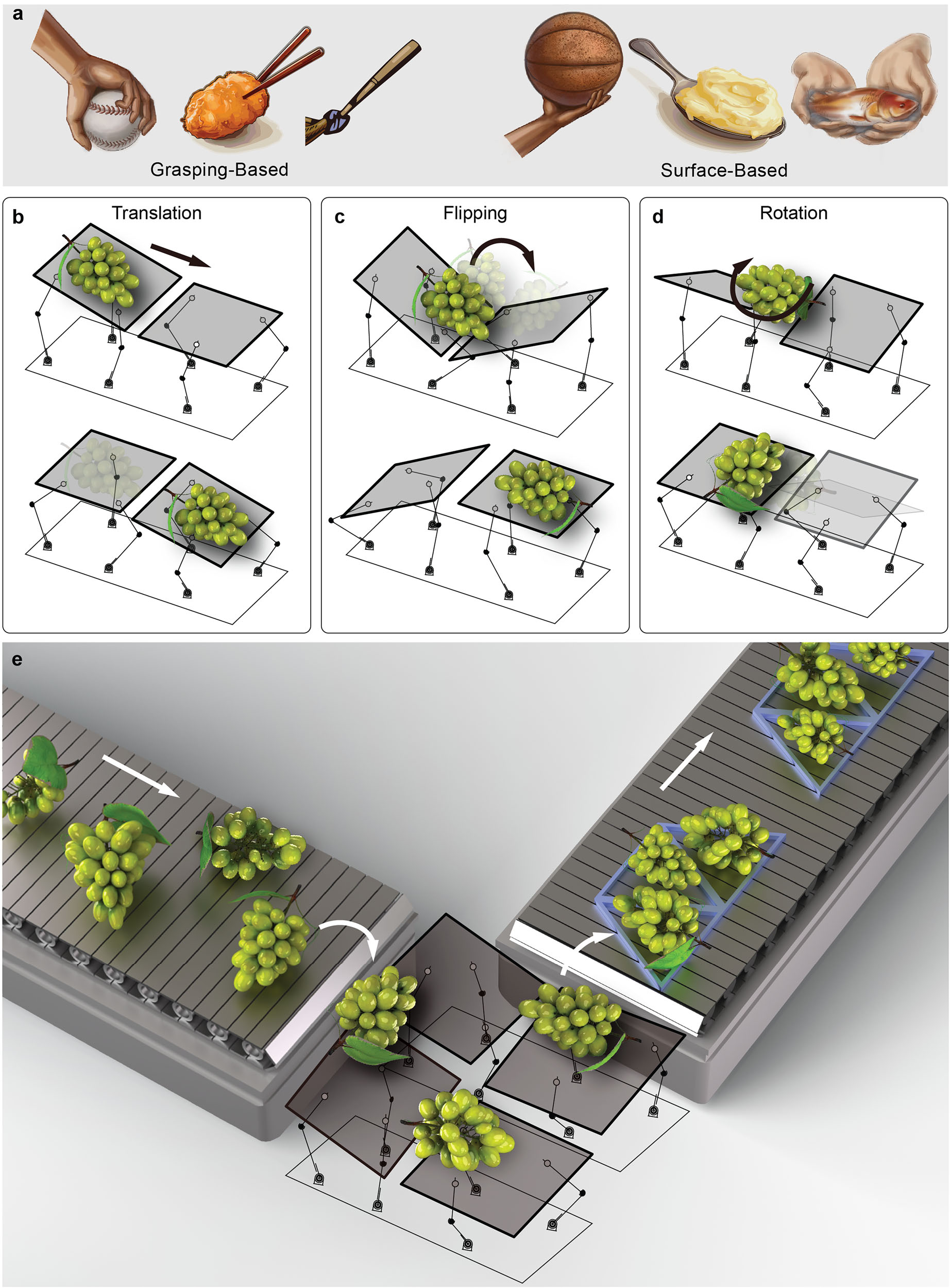
Surface-based manipulation: (a) Grasping vs. surface-based intuition, (b-d) Translation, flipping, and rotation strategies, (e) Food packaging application concept
Rigid Object Manipulation
Translation + 180° flipping of a rigid block — coordinated motion of two surface modules
Rotation to multiple target angles (20°, 30°, 60°, 80°) via coordinated roll and height adjustment
Soft Object Manipulation
Closed-loop translation of a soft, randomly shaped Play-Doh object from multiple initial positions to a target
Shape manipulation — fold-translate-refold sequence transforms a soft strip into a rolled configuration
Heterogeneous Object Manipulation
A slippery fish — surface-based support from below, no grasping needed
Live conference demonstration — manipulating dough on the surface platform
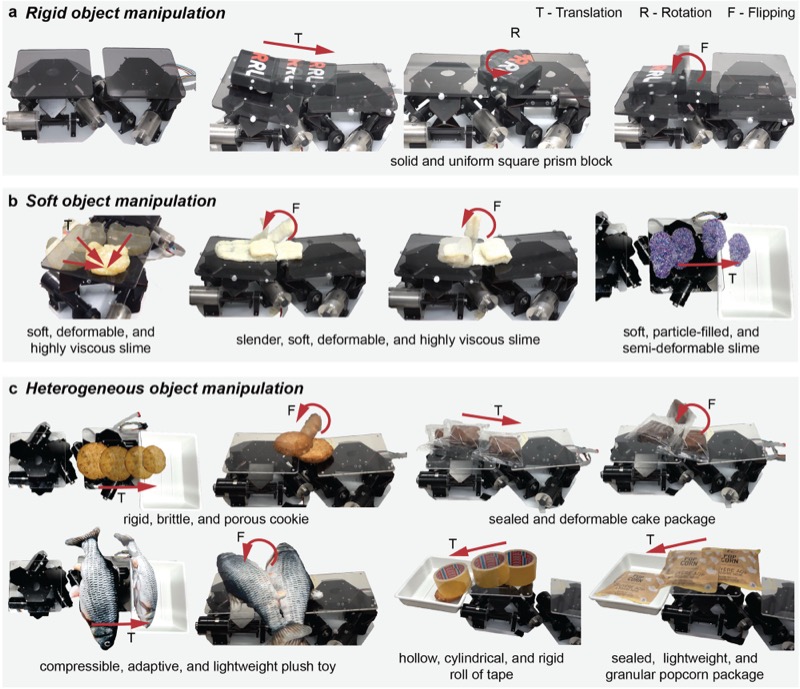
Full overview — (a) Rigid: solid block. (b) Soft: deformable slime, particle-filled slime. (c) Heterogeneous: cookies, plush toys, cake packages, tape rolls, popcorn
Robot Design
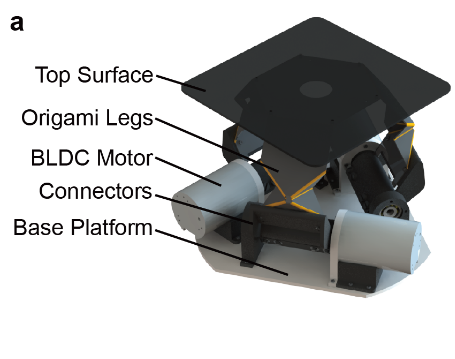
3-DOF surface module — acrylic top surface on origami-inspired legs with BLDC motor actuation
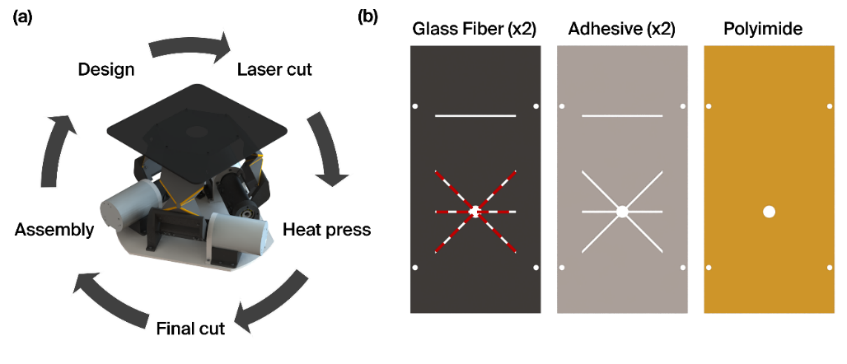
Manufacturing process — FR4 and polyimide layered origami legs, laser cut and heat pressed
Control & Validation
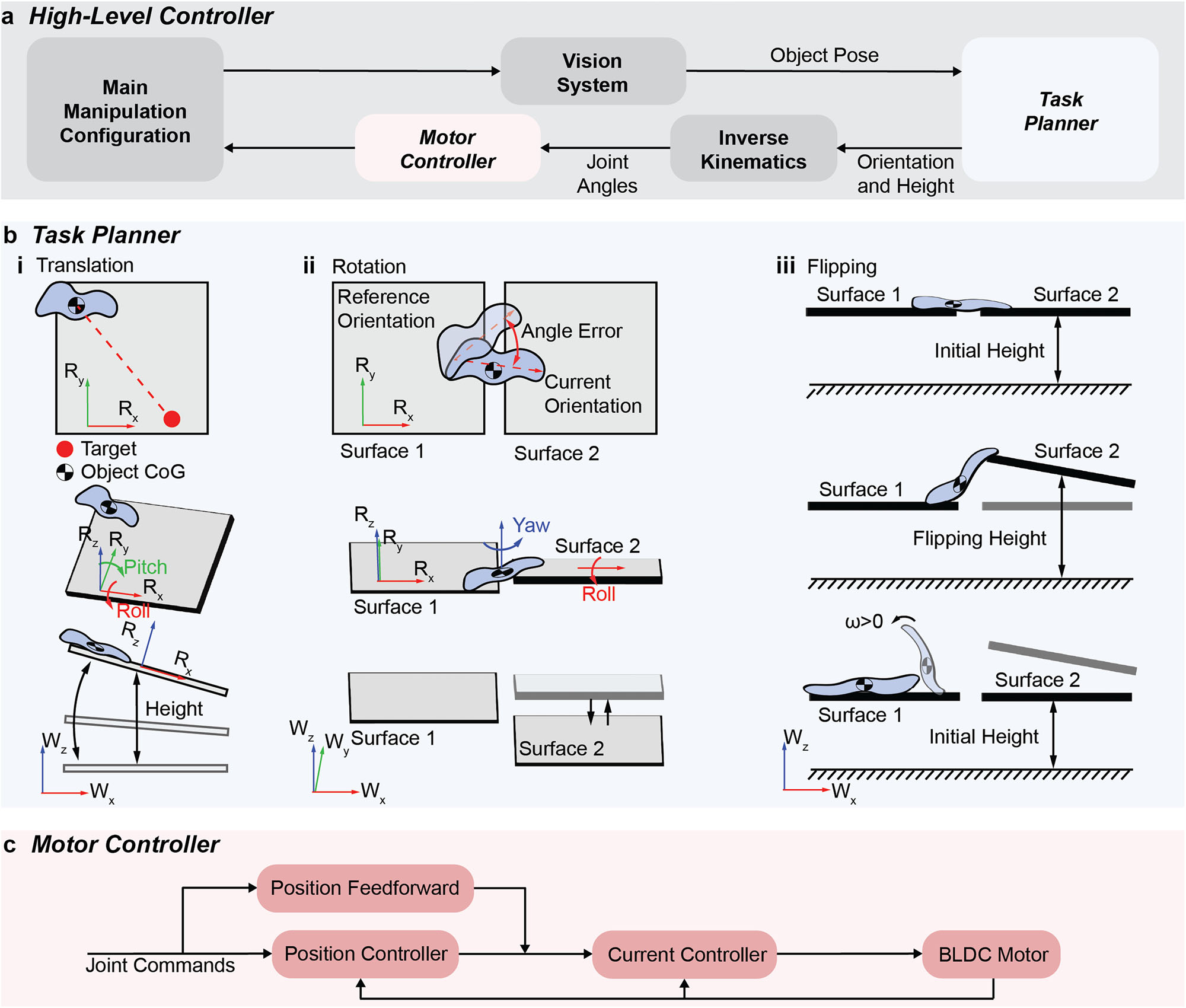
Control architecture — vision-based closed-loop control with task planner for translation, rotation, and flipping
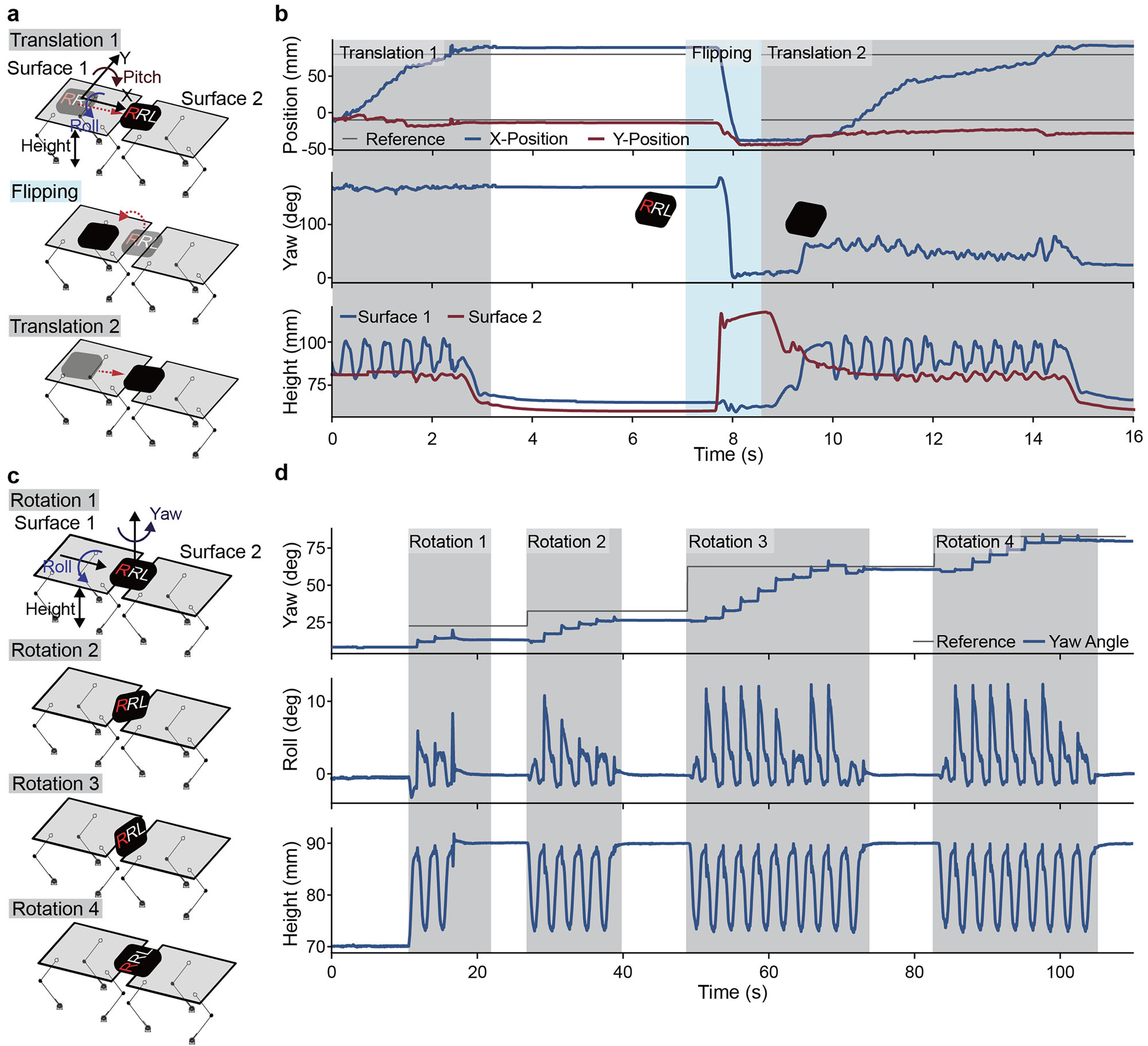
Experimental validation — translation + 180° flipping, and rotation to 20°/30°/60°/80° targets
Key Contributions
- Introduced surface-based manipulation as an alternative to grasping — using flat surfaces as minimalist end-effectors
- Three manipulation primitives: translation (via coordinated pitch/roll/height), flipping (dynamic 180° reorientation), and rotation (Z-axis reorientation)
- Modular foldable robot platform with origami-inspired legs, 3-DOF per module
- Closed-loop vision-based control enabling reliable manipulation of rigid, soft, deformable, and heterogeneous objects
- Shape manipulation of free-form objects through multi-step fold-translate-refold sequences
- Demonstrated on diverse objects: blocks, slime, cookies, plush toys, cake packages, tape rolls, popcorn bags
Published in npj Robotics, 2026 · EPFL Reconfigurable Robotics Lab